北斗伴地图导航app

- 类型:刷机工具
- 大小:28MB
- 时间:2026/5/30 19:40:24
- 版本:1.1.1
- 厂商:北京北斗教仪科技有限公司
- 备案号:
标签:
北斗伴地图导航 导航 地图
北斗伴地图导航app是一款深度整合北斗卫星定位系统的专业导航工具,不仅支持离线地图下载和全程语音导航,还能在无网络、无流量的环境下精准引导用户抵达目的地。应用融合实时路况信息与智能路线规划算法,为每一次出行提供高效、可靠的最优路径建议,让驾驶更安心、更顺畅。
覆盖全国的语音导航服务,助您快速抵达目标地点,并贴心提供附近停车位查询功能,解决“最后一公里”停车难题,让出行更轻松无忧。
专为驾车场景优化的行车语音导航,集成电子地图与电子眼预警提醒,有效规避违章风险;同时支持限行政策查询,帮助用户及时掌握各地交通规则与限行安排,出行更合规便捷。
依托北斗高精度定位能力,实现快速、稳定的地理位置获取,确保导航起点准确无误。配合清晰流畅的语音播报系统,实时传递周边环境、道路状况及导航指令,让您专注驾驶,信息尽在掌握。
创新省电省流语音交互设计,通过语音播报替代频繁屏幕操作,大幅降低电量与流量消耗。驾驶过程中无需紧盯手机屏幕,仅凭语音即可获取完整导航与交通信息,显著提升行车安全性。
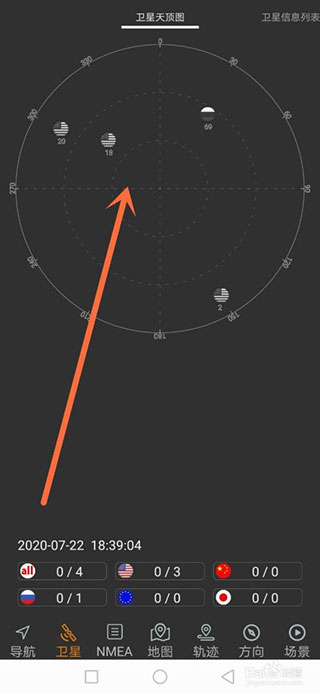
1、在手机主屏幕找到并点击【北斗伴】应用图标,进入主界面后,点击底部菜单中的【卫星】功能选项。


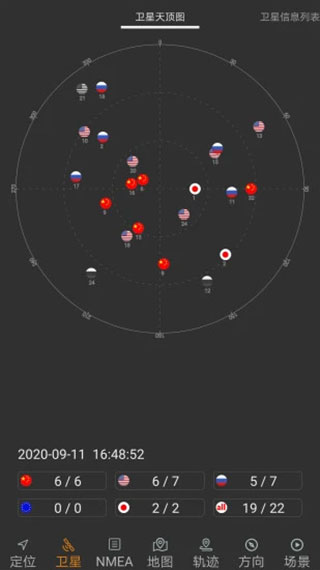
2、进入卫星页面后,请稍等数秒,系统将自动搜索并显示当前接收到的卫星数量。为获得最佳效果,建议在空旷无遮挡的户外环境中使用此功能。
3、当卫星数量成功显示后,点击右上角的【卫星信息列表】按钮,即可进入详细卫星数据页面。
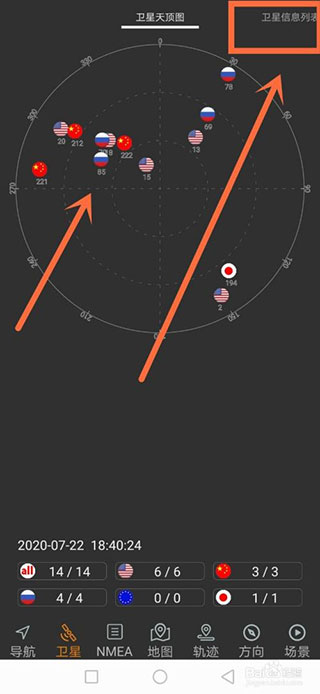
4、在卫星信息列表中,您可以查看来自北斗、GPS、GLONASS、伽利略等全球主要导航系统的卫星数量、坐标、纬度及其他相关参数,便于深入了解当前定位状态与卫星分布情况。

一、无人机组合导航中使用EKF时,观测量速度如何获取?GPS似乎只能输出一个总速度值,垂直速度又该如何获得?
目前实际开发中确实面临这一问题。GPS的NMEA协议通常不包含垂直速度信息,但可通过UBX协议解析原始数据获取,不过解码过程较为复杂,多数方案暂未采用该方式。
另一种方法是利用GPS的高度数据计算垂直速度,但由于GPS高度波动较大,所得垂直速度精度较低,虽可用于EKF初步估算,但稳定性有限。
若EKF仅融合GPS数据,还可结合气压高度计获取高度变化率,从而间接推导出垂直速度,提升系统鲁棒性。
二、采用民用低成本的GPS+北斗+INS模块构建组合导航系统,能否显著提升定位精度?
答案是肯定的。GPS与惯性导航(INS)融合可大幅提升整体定位性能。例如,RTK技术下的相位差分GPS可实现厘米级绝对定位精度,且无累积误差,但易受信号遮挡影响;而惯性导航在短时间内具备极高精度,并能提供高频姿态数据(如陀螺仪输出),尤其适用于动态场景。
尽管各类陀螺仪(如激光、光纤或机械式)均存在随时间增长的零偏漂移问题,导致角度误差累积,但通过GPS定期校正INS,可有效抑制漂移,维持长时间高精度输出。该技术已广泛应用于激光雷达定位、无人驾驶、导弹制导、轨道交通及军用车辆动态瞄准等领域。
1、全面展示手机定位模块输出的多种信息,包括定位模式、经纬度、海拔高度、移动速度、航向、HDOP值、可见卫星数量、卫星空间分布及信号强度等,让用户实时掌握自身位置状态与导航系统运行情况。
2、直观呈现当前接收的卫星信号状态,兼容北斗、GPS、GLONASS、伽利略等多系统卫星,界面清晰显示各颗卫星的信号强弱与方位分布,助力用户优化定位环境。
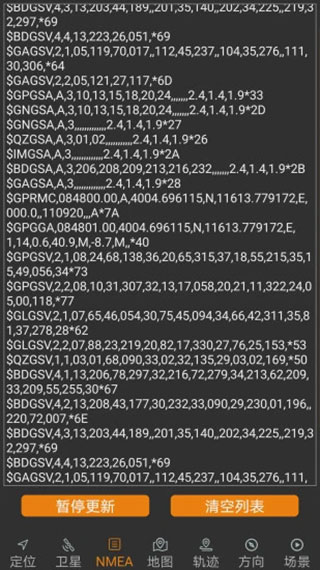
3、支持查看NMEA标准协议下的原始导航数据,满足专业用户对底层定位信息的深度分析需求。
4、可在内置地图上实时标注当前位置,结合地理信息,帮助用户快速识别所处区域及周边环境。
5、具备轨迹记录与绘制功能,自动保存移动路径并在地图上可视化呈现,便于回顾行程或进行轨迹分析。
6、以罗盘形式动态显示设备运动方向与机身朝向,提供更直观的方向感知体验,特别适用于徒步、骑行等场景。
7、支持定位数据的本地存储与回放功能,用户可随时调取历史轨迹进行复盘或分享,提升使用灵活性与实用性。